

Мотор для электросамоката
Самокат с электромотором своими руками


Электрические самокаты сегодня все чаще встречаются на улицах наших городов – на них ездят на работу, не думая о пробках, совершают приятные прогулки в парках и используют для поездок на довольно значительные расстояния. Если вы задумываетесь о приобретении электросамоката, купить его можно без проблем – в магазине электротранспорта Electric-Wheels большой выбор электросамокатов для взрослых и детей по самым низким ценам.
Однако можно собрать самокат с электромотором своими руками – если вы имеете минимальные знании в области электротехники и готовы потратить время на поиск комплектующих. Для многих умельцев самостоятельная сборка электросамоката – это процесс, который принесет радость и удовольствие от результата своего творческого труда, а также позволит существенно сэкономить семейный бюджет.
Электросамокат своими руками
Проще всего сделать электросамокат для ребенка. В этом случае вам можно использовать мотор от обыкновенного шуроповерта – его мощности будет вполне достаточно даже для взрослого самоката. С шуроповерта нужно будет снять все, кроме редуктора и мотора.
Предлагаем рассмотреть самодельный электросамокат с автомобильным бендиксом и конической шестеренчатой передачей. Понадобится аккумуляторная дрель, болгарка, бендикс вы сможете найти в каждом магазине запчастей. Муфта бендикса обеспечит возможность езды на вашем самокате в стандартном режиме – отталкиваясь ногой от земли. Без муфты соединение будет жестким, и это не даст возможности колесам крутиться свободно.

Разбор дрели и болгарки
С болгарки нужно будет снять корпус, а у дрели убрать все, кроме мотора и редуктора. Нужна будет моторная ось с ротором и редуктор с коническими шестеренками. Бендикс устанавливаете на посадочное место диска, следя за тем, чтобы шлицы бендикса врезались в ось.
Если ось будет чересчур толстой для подшипников, может потребоваться ее шлифовка при помощи болгарки. Затем подшипники колес насаживают на ось и приваривают к ней, также выполняют приварку всех внутренних составляющих. Колесо должно вращаться вместе с осью. Вся конструкция устанавливается на самокат, который вы используете в качестве основы, при помощи заклепок и винтов.
Выбор аккумулятора
В данном случае не получится использовать свинцовый аккумулятор – он слишком массивный. Отлично подойдет аккумулятор от электровертолета – установите его на руль, сюда же можно прикрепить и корзину для перевозки небольшого багажа.
Вместо регулятора скорости у вас имеется кнопка регулятора оборотов дрели. Два провода от нее нужно будет подвести к аккумулятору, другие два – к мотору, а саму кнопку тоже закрепить на руле вашего самоката.
Вот вкратце описание того, как сделать электросамокат самостоятельно и сэкономить на покупке готового электрического самоката. Надеемся, материал будет вам полезен, а сам процесс сборки принесет немало приятных минут.
Обратите внимание на материал, посвященный вопросу получения прав на детский квадроцикл.
Электросамокат на мотор-колесе



Всем привет, скоро весна, а это значит, что настает время для двухколесного транспорта. А если педали вам крутить лень, можно подумать о приобретении или изготовлении самодельного электровелосипеда или самоката. Сегодня мы рассмотрим, как сделать простой и мощный электросамокат, который на одном заряде аккумулятора может проехать более 120 км. Построен самокат на основе мотор-колеса, рама изготовлена из всякого металлолома, так что он является довольно тяжелым. Если раму облегчить, самокат сможет ездить быстрее, экономнее и дальше. Конструкция довольно простая, самым дорогим компонентом является мотор-колесо. Если проект вас заинтересовал, предлагаю ознакомиться с ним более детально.
Материалы и инструменты, которые использовал автор:
Список материалов:
– мотор-колесо ;
– части от старого велосипеда;
– арматура;
– листовая сталь;
– аккумуляторы 18650 (от старых ноутбуков и так далее)4;
– стальной уголок;
– фанера, OSB или подобное;
– контроллер для бесщеточных двигателей (36-48В/350W) ;
– электронная ручка управления;
– краска и грунтовка.
Список инструментов:
– болгарка;
– дрель;
– сварочный аппарат;
– гаечные ключи и отвертки;
– электролобзик.
Процесс изготовления самоката:
Шаг первый. Собираем колесо
Сначала соберем заднее колесо, нам понадобится колесо от старого скутера или велосипеда, на него мы установим мотор-колесо. Автору пришлось немного погнуть спицы, чтобы удачно установить мотор-колесо. Ну а далее останется установить шину с камерой и колесо готово.













Шаг третий. Задняя и передняя вилка
Сделаем заднюю вилку, ее автор делает из стального уголка. Просто привариваем уголки к раме, а потом делаем в них пропилы для установки оси заднего колеса.
Что касается передней вилки, то она у автора от велосипеда. Отрезаем от нее все лишнее и обрезаем для нужной длины. К вилке нужно приварить «уши» для крепления переднего колеса, для этих целей автор приваривает стальные пластины и делает в них пропилы под ось.







Шаг четвертый. Палуба
Делаем «палубу» для самоката, точнее раму под нее. Для этих целей автор нарезает арматуру и обваривает ей раму, к ней мы потом прикрутим фанеру или другой подобный материал. Также привариваем пластины и сверлим отверстия, к этим ушам будем крепить листовой материал при помощи болтов.
Когда все будет готово, раму грунтуем и красим, теперь она отлично смотрится, и не будет ржаветь.





























Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.

Первое что вас шокирует это то, что в этом двигателе не будет железа. Не нужно нарезать пластины статора или ротора на лазерном оборудовании, собирать в пакеты и подгонять всю конструкцию к микронной точности. Это обычно мешает обычным людям создавать самим двигатели. Вы удивитесь насколько проста конструкция и не поверите полученным от нее характеристикам.
Обычно вбивая в поиск на ютубе например “электродвигатель своими руками” вы видите катушку и магнит и это вращается и все знают, что да это работает, но кпд там ничтожный и нормальную тягу создать не может. Но, все ошибаются, на самом деле используя правильно катушку и магнит можно сделать мощный двигатель с высоким кпд.
С чего все начиналось. Когда-то просматривая патенты на двигатели я обратил внимание на двигатель из катушки внутри которой вращался длинный магнитный стержень закрепленный на валу, такая конструкция не приобрела распространение по причине низкого кпд из за слабых магнитов которые были в то время и немного неправильной конструкции. Забегая наперед скажу какой должна быть идеальная конструкция двигателя – магнит сферической формы закрепленный на оси полюсами перпендикулярно оси вокруг него располагается круглая катушка квадратного сечения (через нее проходит ось поэтому можно ее разделить на 2 части и разместить ближе к оси) – все – конструкция готова, остается закрепить все в корпусе и получится двухтактный двигатель. Правда найти такой магнит в продаже мне еще не удавалось но если все начнут делать такие двигатели то скоро появятся.
Сейчас в продаже есть магниты цилиндры диаметрально намагниченные с отверстием по оси, они почти идеально подходят (лучше на сейчас нету), стоят они в общем не дешево но все равно дешевле готовых двигателей раза в 2-5, самые крупные внутри катушки с током (15А 100-200 витков) руками не провернуть уже (за магнит не за ось, а за ось и плоскогубцами не провернуть). Первое опасение мое было когда я запускал такой двигатель на самокате – было, не порвет ли он случайно зубчатый ремень при старте. То-есть понимаете что это уже не те игрушечные двигатели с катушкой и магнитом что вы видите на ютубе.


Теперь о КПД, оказалось все очень просто и предсказуемо, когда магнит цилиндр (сфера) повернут полюсами к виткам катушки то сила магнитного поля действует на магнит по касательной то-есть перпендикулярно к радиусу создавая максимальный вращательный момент а когда он повернут полюсами по оси катушки то момент равен нулю а это означает что в таком положении если подать на катушку ток он весь 100% пойдет в нагрев и кпд вращения = 0%, а когда он повернут полюсами к катушке то кпд максимум и зависит от установившегося тока при определенной нагрузке. Например если в этой точке при напряжении питания 10в установился ток 1А то полное сопротивление (активное + реактивное) = 10 Ом и если при этом сопротивление самой обмотки 1 Ом то кпд в той точке 90% (ну и соответственно если сопротивление обмотки 0,1 Ом то кпд 99%). Вывод – обмотка должна быть с как можно меньшим сопротивлением и запитывать ее нужно в тех точках где кпд максимальный их однозначно нельзя запитывать когда магнит повернут вдоль оси или почти вдоль оси так как это 90-100% потери (нагрев). И в этом можно убедится если собрать простой драйвер на 2х ключах (схема в конце статьи) и подать управление от микросхемы с почти любого куллера с 4мы выводами (контроллер управления куллером с встроенным датчиком холла и 2мя выходами которые обычно подключают напрямую к обмоткам). КПД будет на уровне 55% (максимум 72,2% минус потери на сопротивлении зависит от нагрузки на двигатель). Вы уже наверно поняли как нужно повышать КПД, сокращать угол запитки со 180 град до 90 – 45 – 30 – 15, чем меньше тем кпд ближе к 100% но снижается тяга. Где разумный предел, получается при 180 угле потребляем 100 вт отдаем в нагрузку 50-70 вт, если сократить угол до 90 то потребляем 50 вт а отдаем в нагрузку 37 – 44 – (максимум 89,97% – потери) кпд выше но отдаваемая мощность ниже при том же напряжении питания, 120 град (будет аналогично 3хфазному теоретический максимум 86% – потери на активном сопротивлении). Нужен двигатель с большой равномерной тягой и кпд 95%? Запросто – берете 6 магнитов на одну ось со смещением угла катушек или магнитов по 30град получаем 6ти фазный 12 тактный двигатель (аналог 12 цилиндровому двс) с кпд до 97.2% который также можно перепрограммировать на любой другой угол фазы и жертвуя кпд поднимать тягу еще в 2-3 раза при необходимости.
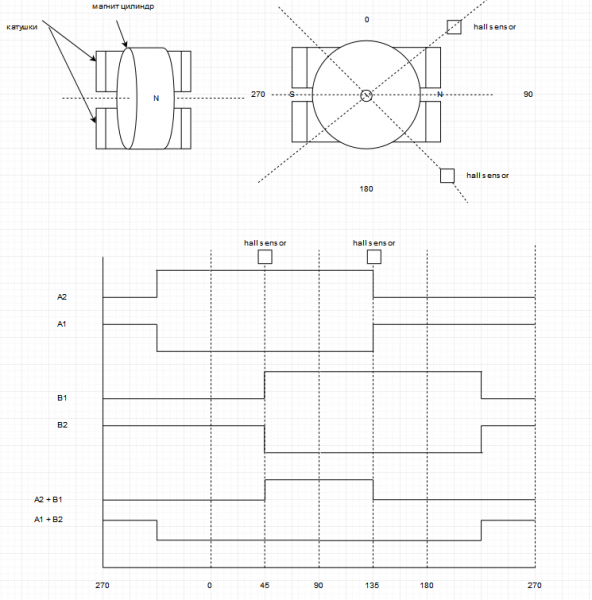
Эскиз ниже показывает конструкцию двигателя и размещение датчиков холла (в примере датчики холла разведены от середины катушки на угол 45 градусов что дает 90 градусов угол запитки обмоток, когда полюса магнита находятся максимально близко к виткам катушки)
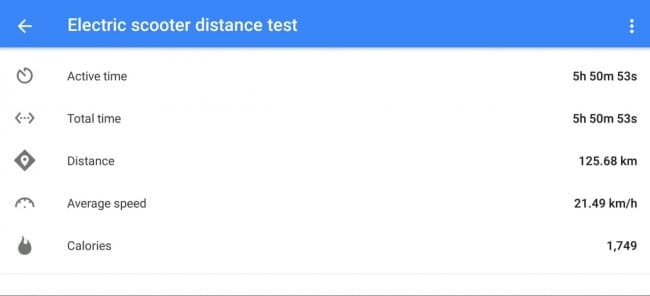
Мой двигатель однофазный двухтактный с углом запитки 110 град выдал кпд 87% на скорости 13 км/ч с нагрузкой 92 кг по ровной дороге при этом обмотки заклеенные в закрытом деревянном корпусе за час непрерывной езды нагрелись аж до 41 градуса при среднем потреблении двигателя 88 Вт. Две обмотки по 125 витков в параллель проводом диаметром 0,83 мм, магнит 65 диаметром, 30 высота, внутренний 18 мм ссылка. В сумме меди 260 грамм из расчета на 260 Вт. Мой вес 85 кг (самокат 8кг с двигателем и батареей, легче только из карбона), питание 10х Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на
15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
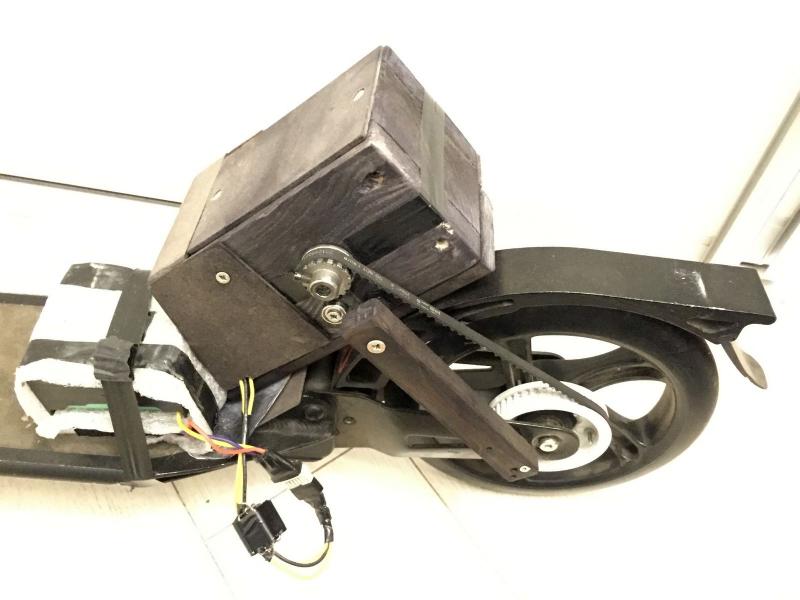
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит – самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 – 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
Контроллер
Фраза “шим регуляция” у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 – 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
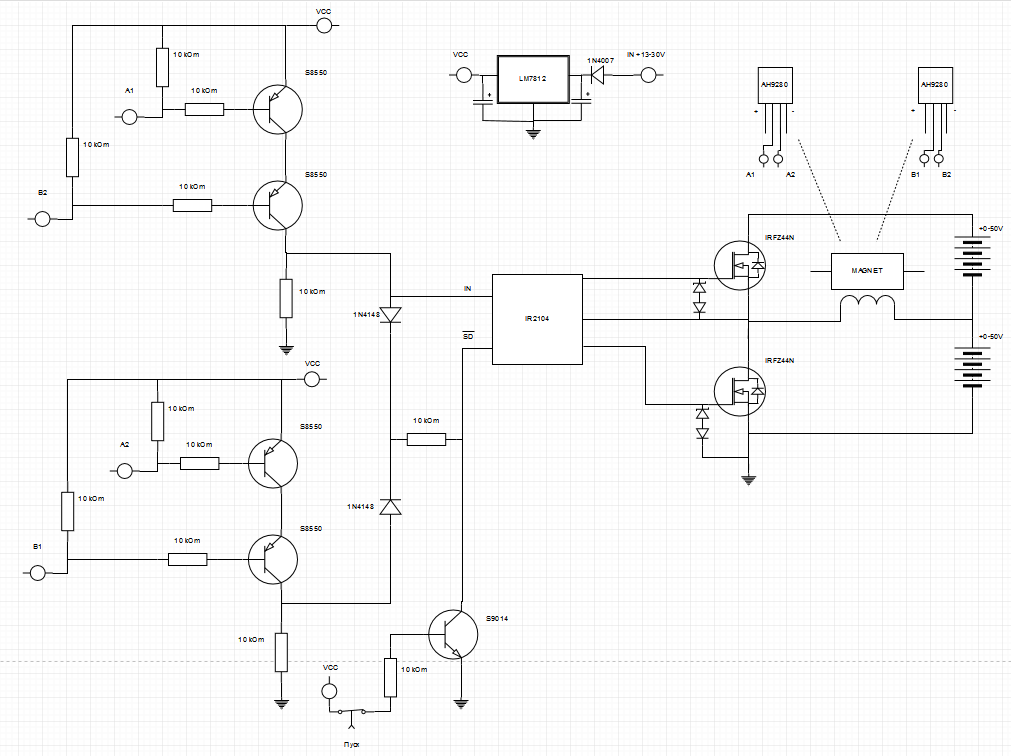
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера – реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 – включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит ( 20.10.2019  Изменена: 04.11.2019
Изменена: 04.11.2019  0
0  6
6
Мотор колесо для электросамоката
Мотор-колесо для электросамоката является лучшим вариантом двигателя для самодельного средства передвижения. Привод колеса от внешнего мотора ему во многом уступает. Поэтому стоит узнать о таком виде двигателя больше.

Что такое мотор-колесо для электросамоката
Моторколесо для самоката является разновидностью ведущего колеса. Это комплексный агрегат, состоящий из нескольких элементов:
- колеса;
- электродвигателя;
- силовой передачи;
- тормозной системы.
Последний пункт присутствует не всегда. Каждое моторколесо обладает индивидуальным приводом. Иначе изделие называют ведущим колесом со встроенным тяговым электрическим двигателем. Оно используется в троллейбусах, электромобилях, электровелосипедах и гибридных автомобилях.
Часто применяют мотор-колесо для самоката. Оно больше подходит для данного средства передвижения, чем привод колеса от внешнего мотора или цепью. Хотя они до сих пор еще встречаются.

Моторколесо станет оптимальным выбором для самосборного электрического самоката. Оно бывает двух видов:
Эти типы имеют важные отличия, свои достоинства и недостатки.
Редукторные моторколеса считаются более легкими, чем прямого привода такой же мощности. Самый высокий КПД присутствует на небольших скоростях. Этот вид обладает хорошим накатом. Его обеспечивает фривил, являющийся полезным при эксплуатации самоката с ножной тягой.
Быстро изнашиваются шестеренки. Со временем их придется менять. Редуктор создает шум при работе. Отсутствует рекуперативное торможение. Имеет более высокий потенциал форсирования. Но это только благодаря большим оборотам вращения.
Изделие с прямым приводом тяжелее, чем предыдущий тип. Зубцовый эффект является причиной низкого наката. Изнашивающихся запчастей нет. Исключением можно считать подшипники. Есть незначительные шумы, которые устраняются применением синусового контроллера.

Хорошо подходят для езды по местностям с выраженными перепадами высот. Оправдывают себя в плане экономии тормозных колодок. В случае установки на мини- и макромодели самокатов рекуперация является единственным адекватным тормозом.
Крепление двигателя к самокату
Еще одним важным достоинством мотор-колеса является легкость в установке. Его крепление не вызывает каких-либо трудностей. Ведущее колесо можно установить как спереди, так и сзади. Последний вариант окажется удобным при частых подъемах в горки. В таком случае привод осуществляется за счет установки цепной передачи, которая требует и наличия редуктора.
Часто в интернете можно встретить запрос “крепления установки двигателя”. Опытные умельцы предлагают собрать самокат из велосипеда и двигателя от бензокосы. Тогда понадобится знать некоторые особенности правильного крепления.

Заднее колесо подключается к мотору через втулку велосипеда. Это позволит ехать по инерции, разогнавшись до нужной скорости и сбросив газ. Также это поможет избежать лишнего расхода топлива и опасного перегрева. Существует и иной способ. Крутящий момент передается непосредственно на шину. Хотя такой вариант считается непрофессиональным.
Нужно разобрать заднее колесо. Стоит убрать всю каретку и обрезать спицы. Надо снять лишние звездочки, т.к. потребуется всего одна. На колесе должна располагаться звездочка большего размера, на моторе понадобится меньшего. Ключевым моментом является определение скорости вращения двигателя, иначе самокат будет слишком быстрым.
Для крепления каретки придется набраться терпения. Необходимо изготовить прокладки, втулки и некоторые другие детали. Затем нужно все это соединить.
Желательно, чтобы у бензокосилки присутствовала центробежная муфта. В противном случае эксплуатация самоката будет неудобной. После активации двигателя он просто сразу уедет. Без проблем мотор будет функционировать на холостых. И движение начнется только после роста оборотов коленчатого вала.

От двигателя следует отрезать кусок вала, идущий за сцеплением. К оставшемуся валу приварить звездочку. Ее нужно тщательно отцентрировать. Это можно сделать при помощи подходящей готовой или самодельной втулки.
Важно, чтобы крепления были совместимы с металлической рамой. Поэтому сначала стоит изготовить шаблон из дерева. Понадобится сделать новую заднюю вилку. Ее задачей является удерживание не только колеса, но и мотора. Подходящим вариантом станут стальные трубы. Они режутся строго по схеме и тщательно свариваются. Под двигатель необходимо смастерить крепление. Для этого понадобится кусок прочной пластины из стали.
В конце остается лишь просверлить отверстие для сцепления и еще четыре для установки двигателя. Лист нужно приварить к задней вилке. Теперь все следует собрать воедино.

